






A single liter of seawater collected from the North Pacific Gyre contains, on average, six times more microplastic particles than plankton by count. The ratio inverted sometime in the mid-1990s and has been moving in the wrong direction since. No net, no pump, no ship-based filtration system can meaningfully address particles smaller than 5 millimeters scattered across 1.6 million square kilometers of open ocean. The physics of the problem is straightforward: the contamination is too dispersed, the particles too small, and the medium too large for any centralized recovery method to reach. What the scale of the problem requires is a machine that operates at the same scale as the contamination – distributed, autonomous, and capable of making decisions in a medium that provides no fixed reference points.
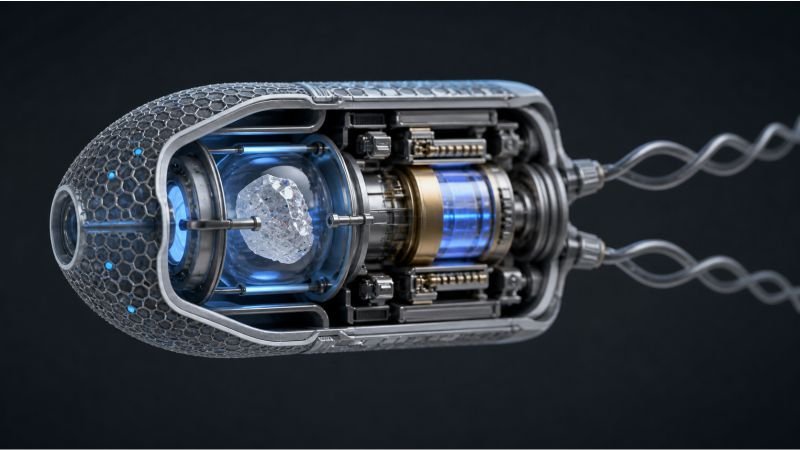
The short version: An ocean cleanup nanobot swarm is a population of autonomous micro-scale machines, each carrying chemical sensors, a propulsion system, and a neutralization mechanism, capable of detecting and processing ocean pollutants at molecular precision. Individual units measure 1 to 100 micrometers across and operate in coordinated groups using local chemical and acoustic signaling, with no central controller. The physics of detection, propulsion, and chemical neutralization are all grounded in established science. The engineering challenge lives in the scale: cleaning the Pacific Garbage Patch in one year demands a population of roughly 900 trillion units operating simultaneously.
Key Takeaways
- The practical unit size for ocean deployment is micro-scale, not nano-scale – true nanobots below 100 nanometers are overwhelmed by thermal noise in open seawater
- 900 trillion units are required to clean the Pacific Garbage Patch in a year; the manufacturing question this creates is larger than the physics question
- Swarm coordination relies on stigmergy – the same mechanism ant colonies use – requiring no radio link and no external computer to manage
- The self-replication line is where this device specification must be drawn early, not after the engineering is done
- At full deployment scale, the ocean cleanup swarm becomes something closer to a planetary immune system than a cleanup device
Table of Contents
What a Nanobot Swarm Would Actually Face in the Open Ocean
Ocean pollution is not one problem. It arrives in several chemically and physically distinct forms, each requiring a different operational response from the same device.

Microplastics – fragments below 5 millimeters – account for the most widespread contamination by particle count. The largest accumulation zones hold an estimated 80,000 tonnes of floating plastic distributed across surface water and the top 200 meters of the water column, with significant fractions settled into deep sediments below the reach of surface operations. Oil contamination arrives in concentrated acute spills and in chronic low-level releases from shipping and industrial discharge. The Deepwater Horizon blowout released approximately 780,000 tonnes of petroleum into the Gulf of Mexico over 87 days – and the contamination dispersed through wave action and bacterial degradation faster than any surface skimmer could follow. Heavy metals – cadmium, mercury, lead – enter marine systems through industrial runoff and atmospheric deposition, dissolved into seawater at concentrations measurable in parts per billion, where they bind to organic sediments and enter the food chain through filter feeders.
The contamination landscape is not uniform, and no single operational mode addresses all three categories with equal effectiveness. The science of how nanomaterials interact with each of these pollution types is covered in the archive’s Nanotechnology in Environmental Remediation principles article. What this device article addresses is the engineering required to build the machine that applies those principles at ocean scale.
Not Quite Nanobots – and Why That Scale Distinction Changes the Engineering
The name is established and probably too late to change. The machine described here operates at micro-scale rather than nano-scale, and that distinction carries real engineering consequences worth examining before the device specification goes further.

A true nanobot operates below 100 nanometers – roughly the size of a large protein molecule. At that scale, thermal noise from surrounding water molecules – Brownian motion – produces random displacements comparable in magnitude to any propulsion force the unit could generate. The energy required to maintain position against that random buffeting, while simultaneously running a sensor array and a processing unit, exceeds what any known power storage mechanism can supply at that volume. Nanobots exist as a concept for targeted medical applications inside biological cells, where diffusion can be used rather than fought. In open ocean water, they are physically impractical as active machines.
The practical deployment zone sits between 1 and 100 micrometers. At this scale, Brownian motion is still present but manageable – a microbot can maintain directed motion against thermal noise using modest power budgets. Surface-to-volume ratios remain high enough for meaningful sensor exposure to surrounding water. Fabrication at this scale is an extension of current MEMS technology rather than a conceptual leap into new physics. The engineering consequence is that an ocean nanobot swarm is more accurately a microbot swarm, and its individual units are closer in scale to a bacterium than to a protein. This is not a lesser device. It is a device constrained by real physics to operate in a range where real engineering solutions exist.
How the Ocean Cleanup Swarm Would Operate
Each unit in the swarm carries three functional systems: a sensor layer, a propulsion system, and a neutralization mechanism. All three share a power supply and a minimal onboard processing unit that runs local decision logic. Understanding each individually is what makes the coordination architecture legible.
Detection: Reading Chemical Signatures in Moving Seawater
A microbot identifies target pollutants through surface-mounted chemical sensors that respond to specific molecular interactions. Receptor molecules on the sensor surface bind preferentially to target compounds, generating a detectable electrical signal on contact. For microplastics, the sensor responds to specific polymer surface chemistry. For petroleum compounds, to aromatic hydrocarbon signatures. For heavy metals, to chelating ligands that selectively bind metal ions.
The sensor does not need to identify every dissolved substance in seawater. Seawater is chemically complex – dissolved salts, organic matter, biological exudates, and trace minerals generate significant background noise. The specification requires selectivity sufficient to produce a clear signal for target compounds at contaminated-zone concentrations while suppressing response to the far larger background chemistry. Beyond its primary detection function, the sensor layer carries a secondary purpose: continuous water quality monitoring. Each unit records the concentration of target compounds at its current location and timestamp. Aggregated across a population of hundreds of trillions of units over months of operation, the dataset becomes a spatial and temporal map of ocean contamination at a resolution no ship-based monitoring network could approach. The swarm is simultaneously a remediation device and a planetary sensor network.
Propulsion Against Currents and Pressure
Moving through seawater at micrometer scale runs into a fundamental fluid mechanics constraint. At unit dimensions below 100 micrometers, the Reynolds number drops below 1, meaning viscous forces dominate over inertial ones. A unit the size of a bacterium cannot swim like a fish – the fluid mechanics do not work the same way. Biological microorganisms at this scale use rotating flagella, generating thrust through a corkscrew motion that functions effectively in the low-Re regime.
A synthetic microbot propulsion system based on rotating helical flagella – fabricated from magnetic or piezoelectric materials responsive to external electromagnetic or acoustic field sources – operates on the same physical principle. For large-scale transport, the device aligns passive flagella response to dominant current direction, using ocean currents as a free conveyance system. Active propulsion handles local positioning near a detected target. For deep ocean deployment below 200 meters, pressure compensation is a design requirement: sealed units with pressure-equalized internal spaces survive the descent from surface to depth. Temperature drops from around 20 Celsius at surface to below 4 Celsius in deep water, affecting fluid viscosity and sensor response characteristics that onboard logic must continuously correct for.
Neutralization: Three Approaches and One Core Trade-off
Three neutralization strategies are physically available to a unit that has reached a target pollutant, each with different energy costs.
Encapsulation surrounds the pollutant particle with a polymer shell, preventing further fragmentation and biological uptake. The encapsulated package is flagged with a chemical marker for retrieval by aggregator units or by surface collection systems. For microplastics, encapsulation is the most energy-efficient approach – it requires physical containment, not chemical decomposition. Catalytic degradation uses surface-mounted catalysts to break polymer chains or petroleum compounds into smaller molecules that natural bacterial communities can process further. Titanium dioxide nano-catalysts photodegrade certain plastics and hydrocarbons under UV exposure, making this approach most effective near the surface where light penetrates. At depth, without UV input, catalysis draws on stored chemical energy in the unit’s power supply. For concentrated polymer and metal fractions recovered through encapsulation, a downstream option worth noting is atomic-level reprocessing: the collected material becomes viable feedstock for quantum recycling machines, where elemental recovery at near-100-percent purity is achievable once the input stream is pre-concentrated and chemically characterized.
For heavy metal ions in solution, neither encapsulation nor catalysis applies directly. Electrodeposition – using the unit’s power supply to drive metal ions from solution onto an electrode surface – concentrates metals onto the unit body for subsequent retrieval. The energy cost is substantially higher than polymer processing. That cost is part of why dissolved metals represent the hardest operational target for this device, a point worth returning to in the limitations section.
Swarm Coordination Without a Central Controller
A population of 900 trillion units cannot be managed by any central computer. The communication bandwidth alone would be physically impossible – each unit transmitting status and receiving instructions would require a radio network that does not exist at that scale in open ocean. The device needs a different coordination model, and the one that works is the mechanism evolution found independently across dozens of social species: stigmergy.

Stigmergy is coordination through environmental modification rather than through direct instruction. Ant colonies have no manager directing individual workers. Each ant follows local rules – follow pheromone trails above a certain concentration threshold, deposit pheromone when food is found, increase deposition rate when ambient concentration already exceeds the threshold. The organized foraging behavior that emerges from those local rules is a property of the interaction rules themselves, not of any individual decision. An ocean cleanup swarm operates on equivalent logic: each unit emits a chemical signal when it detects a pollutant above threshold concentration, units in the vicinity move toward higher signal concentration, units that have neutralized a local target emit a depletion signal. The swarm self-concentrates around contamination and self-disperses once a zone is processed.
The Communication Problem at Ocean Depth
Chemical signaling in open water has a range problem. A chemical signal released by one unit in a current spreads downstream but not upstream, attenuating with distance in all directions. For regional coordination across kilometers – directing units toward a newly detected oil spill plume, for example – chemical signals are insufficient. The practical solution is a two-layer communication architecture. Local coordination, within meters, uses chemical signaling. Regional coordination, across kilometers, uses acoustic signals: pressure waves that propagate through water at 1,500 meters per second. A cluster of units detecting a large contamination source generates a low-intensity acoustic pulse that propagates through the water and triggers directed movement in distant units. The acoustic layer requires no external infrastructure – the units generate and receive the signals themselves, using the ocean as a transmission medium.
The Arithmetic of Actually Cleaning an Ocean
The numbers here are worth running carefully, because they do not flatter the technology.
The Pacific Garbage Patch holds an estimated M = 80,000 tonnes of plastic, or 8 × 10^7 kg. A microbot operating in encapsulation mode can process approximately r = 10 nanograms of plastic per hour – a reasonable estimate given unit dimensions and encapsulation shell mass. That works out to r = 2.4 × 10^-10 kg per day per unit. The required swarm population for a target cleanup duration follows from:
N = M / (r × t)
where N is the required unit population, M is total pollutant mass in kg, r is processing rate per unit in kg per day, and t is target duration in days.
For a 365-day cleanup cycle: N = (8 × 10^7) / (2.4 × 10^-10 × 365) = (8 × 10^7) / (8.76 × 10^-8) ≈ 900 trillion units.
Extending the timeline to 10 years reduces the simultaneous population requirement to 90 trillion – still a number that requires a manufacturing scale no current process approaches. The number is not a reason to dismiss the device. It is a reason to understand where the real engineering challenge lives: not in the physics of the individual unit, but in the production of the population.
| Target Contamination | Approximate Mass | Swarm Size (1-year cleanup) | Primary Operational Challenge |
|---|---|---|---|
| Pacific Garbage Patch (floating plastic) | 80,000 t | ~900 trillion units | Manufacturing scale |
| Major oil spill (Deepwater Horizon scale) | 780,000 t | ~9 quadrillion units | Decomposition rate at depth |
| Coastal microplastic hotspot (harbor scale) | ~500 t | ~6 trillion units | Sediment penetration |
| Industrial discharge plume (heavy metals) | ~100 t | Undefined – energy cost prohibitive | Electrodeposition energy budget |
The targeted rapid-response scenario changes the arithmetic substantially. A swarm of millions of units – not trillions – deployed within hours of a defined oil spill event, into a bounded contamination zone before dispersion renders the problem unmanageable, operates in a regime where both the manufacturing challenge and the energy budget are tractable. The technology makes more immediate practical sense as an acute event response system than as a bulk remediation tool for decades of accumulated waste.
Everything here is free. Readers are the reason it stays that way.
I make all of it alone, with no ads. If it is worth a coffee a month to you, that keeps the next one coming.
Keep it alive →Where the Swarm Fails – and Why That Answer Matters
Honest accounting of what this device cannot address is more useful than an unqualified applications list.
Dissolved heavy metals at open-ocean concentrations – mercury at 0.001 micrograms per liter, cadmium at comparable levels – are so dilute that the energy cost of electrodeposition exceeds what any micrometer-scale power cell can supply. The swarm addresses dissolved metals only in contaminated discharge zones where concentrations are orders of magnitude above open-ocean background levels, not across the diffuse global marine environment. Radioactive isotopes dissolved in seawater present a related problem compounded by the physics of isotope separation: distinguishing cesium-137 from cesium-133 requires atomic-resolution manipulation that operates at a scale below what any microbot can perform in open water – that problem belongs to a different class of machine. Biological contamination – harmful algal blooms, pathogen-bearing discharge, invasive species – falls outside the device specification entirely.

The comparison with biological remediation agents is instructive on the petroleum question specifically. Hydrocarbon-degrading bacteria – Alcanivorax, Marinobacter, and related genera – naturally colonize oil spills and degrade petroleum compounds through enzymatic pathways. They self-replicate, require no manufacturing, cost nothing to deploy, and have been performing this function across hundreds of millions of years of evolutionary refinement. For oil contamination specifically, bacteria outperform any microbot swarm on every metric except one: temporal and geographic targeting. Bacteria arrive when growth conditions favor them. A swarm deploys on command. The distinction between those two operational profiles is where the device justifies its existence.
The Risks That Arrive With the Solution
Two risk categories have no parallel in previous cleanup technology, and both deserve examination without optimism.
The swarm becoming the next pollutant is the more immediate concern. A population of 900 trillion units manufactured from any synthetic material represents hundreds of tonnes of novel particles introduced into marine ecosystems. If unit degradation during operation produces fragments at the nanoscale, the swarm has replaced microplastics with nanoplastics. The engineering specification requires complete biodegradability at mission end – units that decompose into non-toxic organic compounds on a defined timeline, triggered by environmental conditions or a retrievable chemical signal. Meeting that requirement while maintaining structural integrity throughout active operation is a materials engineering problem with no currently available solution. Retrieval is the complementary approach: encapsulated packages, chemically tagged and aggregated into surface-accessible clusters, allow mechanical collection by support vessels. A hybrid strategy – retrieving concentrated material fractions, allowing unit bodies to biodegrade – is the most physically defensible architecture, though it requires materials that have not yet been demonstrated at this scale.

Interaction with marine biology in this size range is poorly characterized. Microbes, plankton, and fish larvae all operate in the same dimensional zone as the units. A population of synthetic particles emitting chemical signals and low-intensity acoustic pulses introduces stimuli that marine organisms have no evolutionary reference point for. Precautionary specification requires units that are chemically inert to biological tissues, acoustically below the threshold that triggers behavioral changes in plankton, and physically distinguishable from food particles by filter feeders. All three requirements are technically addressable. None of them has been tested in open marine ecosystems.
The self-replication question is where the device specification must be drawn most carefully – and drawn early, not after the engineering is advanced. A swarm capable of manufacturing copies of itself from dissolved marine minerals and carbon compounds would solve the population-scale problem completely. A population of 900 trillion units that grows to its own target size without a manufacturing facility changes the economics of the entire project. It is also a machine with no off switch, operating across 361 million square kilometers of shared ocean. The device described in this article does not self-replicate. Units are manufactured, deployed, and either retrieved or biodegraded. The manufacturing challenge remains real and unsolved. That is the correct trade-off, because the alternative is a different device with a risk profile that no current engineering framework can evaluate.
From First Deployment to Active Ocean Infrastructure
The development arc of this device moves through three distinct phases, each requiring different engineering maturity.
First-generation systems are single-purpose, manually deployed, and retrieved by support vessels. A prototype swarm of millions rather than trillions targets a specific, bounded contamination zone – an acute oil spill, a harbor discharge plume, a coastal microplastic hotspot. Recovery uses a mechanical aggregation system: a clustering signal concentrates units into a retrievable mass, which support vessels collect. The mission generates data on sensor calibration under real ocean chemistry, propulsion performance across current profiles, and biodegradation timelines under field conditions. Without that data, larger deployments rest on assumptions rather than measurements.
Mature deployment integrates the swarm into ocean monitoring infrastructure. Units fabricated from validated biodegradable materials with defined operational lifespans are released from automated buoy networks. The swarm operates continuously across high-priority zones – major shipping lanes, river outflow points, gyre accumulation regions – and replenishes as units degrade. At this stage, the monitoring function becomes equally important to the remediation function: a persistent real-time picture of ocean chemistry at spatial resolution no ship-based network could generate.
At civilizational scale, a fully deployed ocean cleanup swarm is not a device – it is infrastructure. The distinction matters because infrastructure changes the relationship between humans and the systems it serves. A swarm maintaining chemical baselines across the global ocean, responding to acute contamination events autonomously, and transmitting continuous data to surface networks, represents something that has not previously existed: a managed chemical environment at planetary scale. Whether that reads as a solved problem or as a permanent responsibility that cannot be abandoned once started depends on how seriously the engineering takes the biodegradation and retrieval requirements from the first prototype forward.
The View From NoSuchDevice
I find the scale numbers on this device clarifying in a way that most swarm robotics discussions are not. 900 trillion units for one cleanup site is not a number that invites enthusiasm, and I think the honest response to it is to accept what it implies: the full version of this machine requires a manufacturing capability that does not currently exist and would represent one of the largest industrial undertakings in human history. Stating that plainly is more useful than generating an applications list that elides the production problem.
What I find defensible is the targeted rapid-response version. A swarm of millions of units deployed within hours of an oil spill, working a bounded contamination zone before wave action disperses the problem beyond any recovery threshold, is a device where the arithmetic works and the manufacturing challenge is not civilizational in scale. That version has a development path and a use case with a clear value proposition. It also generates the field data – biological interaction profiles, material degradation timelines, behavioral performance under real currents – that any responsible larger deployment would require.
The self-replication question is where I think the line needs to be drawn before the technology passes the prototype stage, not after. A device that solves the manufacturing problem by growing its own population from dissolved ocean minerals is a different risk category than one that does not, and the difference is not gradual. I am not opposed to ambitious engineering. A self-replicating chemical machine operating in an environment shared with every marine organism on the planet is a decision that cannot be reversed if the control architecture fails. The non-replicating version stays in engineering territory. The other version enters a conversation that engineering alone cannot close.
You read the whole thing.
That is rarer than it should be, and it is the exact kind of attention I built this archive for. I make every piece alone, with no ads and no investor deciding what gets written. If you want the next machine taken apart like this one, you can help me make it.
A coffee a month is enough to keep it free for everyone.
Prefer crypto or a one time gift? Other ways to give →
